The team has been involved with various projects. Please visit our youtube channel for the lates update.
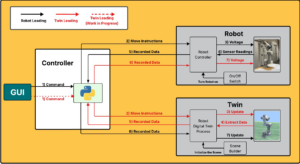
Digital Twin | R&D
Together the real robot (physical twin) and its virtual counterpart (digital twin) form a synthetic environment is impactful in various applications. This ongoing project, which involves dynamic modeling, data streaming, and software development, is led by Michael Mullaney (’24) and Bryan Chris Ngnagupa (’24).
Robotics Manipulation | R&D
Take a look at Yisrael (’23) and Abby’s (’23) exciting work. They started the project from the ground up: from kinematics analysis to path planning design. The lab code base is expanded significantly because of their hard work.
We are looking for senior-undergrads and graduate students to continue this project! See Cobots for more information.
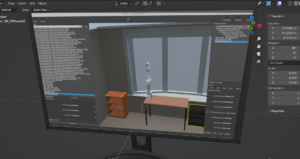
Robotic Manipulator Simulation | R&D
Utilizing VxSim™, the team is working on creating a digital twin of a robotic manipulator as a simulation environment. Students wants to participate this project must be comfortable with Python and C++.
VxSim™ is a software framework developed by Dynamic Dimensions Technologies LLC, a tech start-up located at Westminster, MD. More information about VxSim™ can be found here.
ASEE 2022 | Education Research
Dr. Wu transformed ENME482L to a fully online course during the COVID-19 pandemic. The innovative teaching format was documented along with feedback from the students, and it is published at the ASEE annual conference.
The research was presented on June 2022 at Minneapolis, MN. Picture shown at right is the title slide of Dr. Wu’s presentation. The full paper is available here: ASEE2022_TWu
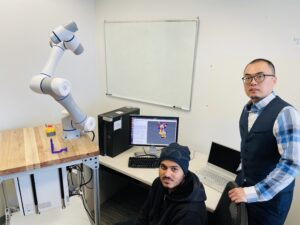
Robotic Manipulator Testing | R&D
Aiming to bring hands-on experience to the senior-level robotics course (ENME475), a 6 degree-of-freedom collaborative robotics manipulator is selected as a test bed. The team has explored MATLAB SDK (software development kit), Python SDK and ROS SDK. (Sagar Ojha, ’22)
More development is on the way. See Cobots for more information.
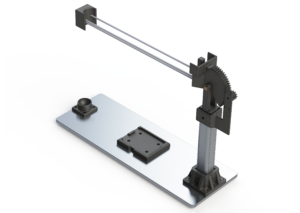
Ball Balancer | Senior Capstone
Attempting to build the equipment for the Control’s Lab (ENME482L), the device consist of a Arduino Uno, a servo motor, and an ultrasonics sensor. The goal is to design a motion controller to balance a steel ball. A prototype has been built by a capstone group in Fall 2021, and it won the ASME Best Project of the semester.
We are looking for students to continue this project.
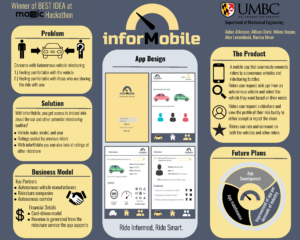
MAGIC Hackathon | Student Competition
Hosted by MAGIC, the event gathered undergraduate students with challenging design topics. Six groups of UMBC students attend this intense competition to design a mobile app over a weekend. Three of them were categorized winners. One of the winners pitched the idea of having users to schedule a autonomous rideshare, and the students were invited to the 2021 Westminster Autonomous Vehicle Showcase to present their idea.
Check the presentation slides for the autonomous ride share: inforMobile.